

怎么样去控制机器人抓取

中国智能制造工程师培训基地
11年案例教学法,一线企业实战经验
一对一教学,因材施教
工程师岗位,高薪就业
1. 什么是机器人抓取?
如下图所示,给定一个物体和手,机器人抓取的基础问题分为三个:
怎么样去抓
怎么样去控制
怎么样去操作
按照难度,这三个问题基本是依次递增的。
(1)怎么样去抓?(Grasp Planning)
这个问题基本是一群大牛一开始就研究的问题,包括Salisbury,Mason,Cutkosky,Khatib 等等。大家研究来研究去,就是想知道:给定一个物体,给定一个任务,给定一个手,这个手该怎么去抓这个物体才是最好的?这个方向的最著名的结果算是force-closure了, 在很长时间基本相当于控制里面的稳定性的重要性了。
我在读博士前两年,基本也是做这个,当时带我的博士后Sahar在这个方向做得相当不错,不过她转行搞金融去了。最近这个方向基本就是往与Learning结合的套路上走,可以参考Sergey Levine在Google时的工作。
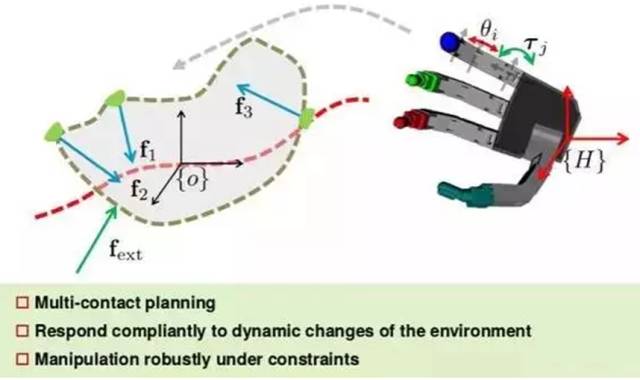
(2)怎么样去控制?(Grasp Control)
这个问题就是研究力控,包括手指末端的力控,触觉控制等,刚度控制,阻抗控制等等。很长一段时间,大家都在试图计算什么样的手指抓取力才是最优的(话说当年开始读硕士时,第一个给我邮寄纸质论文的Imin Kao 教授就是做抓取的刚度控制的)。这里面以Martin Buss和李泽湘老师组的工作最为著名,将一个非线性优化问题转化成一个线性矩阵不等式问题,基本在几十毫秒左右可以得到优化结果。
最近的这个方面的最好的工作应该算是DLR出来的object-level impedance control(IJRR)了。现在还坚守在这个方向的主要就是几个日本教授了,包括我的合作者Kenji。话说Kenji的老板Arimoto教授,退休后才开始搞机器人抓取的,还出了本书。他属于上古大神级别,现在很少有人知道。
(3)怎么样去操作?(Dexterous Manipulation)
其中最后一个问题关于灵巧操作,已经很多年没有什么好的进展了,现在也很少有人去碰这个问题了。Cutkosky的博士论文是搞这个,后来还搞了几年,再后来把实验室名字都换了,算是转方向了。Peter Allen 组以前有个博士后搞这个,后来好像是潜水挂了,很是遗憾。最近的soft robotics火了,这个方向好像有了新的转机,Oliver Broc也开始做这个方向了。
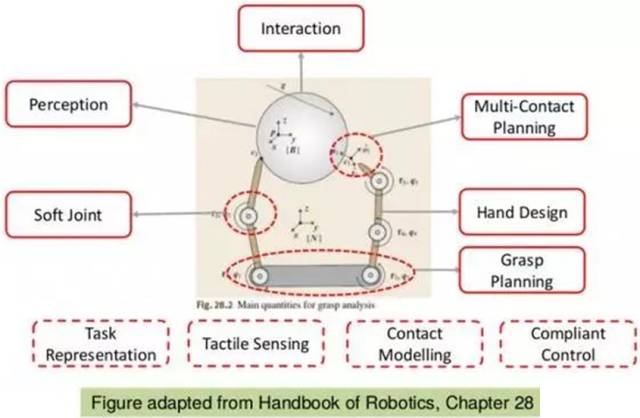
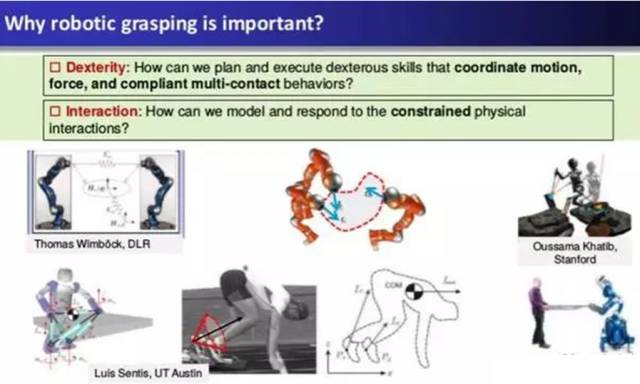
2. 为什么机器人抓取重要?
如下图所示,机器人抓取的研究涉及到很多方面,包括机械,控制,计算机,人工智能等等。很多时候,机器人抓取是一个很好的最小研究例子(minimal example),来支撑各个方向的研究。其次,机器人抓取中的研究内容,特别是灵巧性和交互性,能够对其他很多相关的研究起到作用,下面的第二张图就说明了这一点。另外,抓取也是机器人走进真实世界必不可少的功能,手对人类是如此重要,我们当然希望赋予机器人同样的功能。
3. 为什么机器人抓取很难?
抓取对我们而言是如此简单,所以我们很有可能认为对机器人也很简单,但实际上是相当难的。如果看过各种或者参加过各种抓取比赛,应该是生无可恋了,机器人抓取的底线比你想象的肯定要低。但是很多paper中的数据都是在制定的非常不真实的条件下,给人一种很高的成功率的感觉。记得我在我博士论文里面给了个30%左右的成功率,有个答辩委员问我为什么这么低,这不符合常理。但是这就是现实。
现实世界有太多的不确定性,因为不确定性,我们在抓取中用到的模型基本上都是不准确的,甚至是错的。而我们又没有足够好的传感器,可以实时给我们反馈真实的状态。更糟糕的是,我们连一个好点的手也没用,很难准确的去控制机器人手到我们想要的状态。未来很长一段时间,怎么样处理这些不确定性,将会是机器人抓取的一个热点方向。其实这个方向也很热,基本每年都有相关的workshop。
4. 未来的方向?
既然还有这么多的未解决的问题,那么未来的方向在哪里?我自己总结了几个点:更好的理解不确定性,更多的利用接触,更灵巧的设计,更稳定的传感器。这几个方向的阐述,也是很大的一个坑,将来一个个添补吧。(我博士毕业后,如果去美国做博士后,就是研究其中的第一点和第二点)。如果这几个点做好了,机器人抓取离大面积的现实应用也不会太远。




最新产品
同类文章排行
- 加工中心有哪些不同的刀柄?你知道几个?
- 把握刀具与机床的匹配性要点
- 4缸、6缸、8缸、10缸、12缸发动机发动机是怎么工作的?
- 加工中心G指令一览表,值得收藏。
- 机加工工艺基础全集!
- 什么是表面粗糙度,你真懂吗?
- 直线度、平面度、圆度、圆柱度...你都了如指掌了吗?
- 螺栓、螺钉、螺丝三个概念有什么区别?
- 线切割的加工价格计算方法!
- 螺纹锥度算法!
最新资讯文章
您的浏览历史
